انجام پروژه و پایان نامه های مهندسی برق توسط پایان پژوهش
با تقدیم احترام ، گروه آموزشی - خدماتی پایان پژوهش آماده دریافت پروژه های مهندسی برق قدرت می باشد .
این گروه متشکل از دانشجویان کارشناسی ارشد و دکتری و همچنین فارغ التحصیلان دانشگاه های تهران آمادگی خود در زمینه دریافت پروژه های تئوری ، عملی و پایان نامه های تعریف شده در کلیه زمینه های مهندسی برق قدرت را اعلام می کند .
سفارش شبیه سازی ، مشاوره ، انجام پروژه و پایان نامه در زمینه سیستم های قدرت ، انرژی های نو ، دینامیک سیستم های قدرت ، الکترونیک قدرت ، بازار برق ، سیستم های هیبریدی و ... توسط نرم افزارهای متداول در سیستم های قدرت شامل متلب (Matlab) ، پی اس کد (Pscad) ، گمز (Gams) ، هومر (Homer) و ... پذیرفته می شود .
-.-.-.-.-.-.-.-.-.-.-. -.-.-.-.-.-.-.-.-.-.-. -.-.-.-.-.-.-.-.-.-.-. -.-.-.-.-.-.-.-.-.-.-. -.-.-.-.-.-.-.-.-.-.-.-.-.-.
مراحل اجرایی کارهای پروژه ای شما به شرح زیر می باشد:
1- ثبت پروژه شما در زمینه های سیستم های قدرت ، بازار برق ، ماشین های الکتریکی ، دینامیک سیستم های قدرت ، مبدل های سیستم های قدرت ، سیستم های هیبریدی ، انرژی های نو ، پایداری و کنترل ریزشبکه ها ، ادوات FACTS و ... به عنوان پروژه های قابل انجام توسط گروه پایان پژوهش.
2- راهنمایی و تدوین مراحل لازم به منظور اجرای پروژه اعم از مراحل جهت اخذ داده های اولیه مسئله ، بیان تئوری کار ، بیان روابط ریاضی مورد نیاز ، مقدمات شبیه سازی و نهایتا دریافت خروجی های شبیه سازی .
3- ارائه نتایج کار و انطباق با نتایج مقالات و پروژه ها
4- راستی آزمایی پروژه
-.-.-.-.-.-.-.-.-.-.-. -.-.-.-.-.-.-.-.-.-.-. -.-.-.-.-.-.-.-.-.-.-. -.-.-.-.-.-.-.-.-.-.-. -.-.-.-.-.-.-.-.-.-.-.-.-.-.
مراحل اجرایی کارهای مرتبط با پایان نامه
1-تدوین موضوعات مناسب و با قابلیت اخذ تایید از شورای پژوهشی دانشگاه ها (این مرحله شامل فیلتر موضوعات تکراری ، ارائه موضوعات با قابلیت بهره برداری به صورت مقالات داخلی و ISI ، قابلیت انجام با توجه به زمان لازم)...>>>...(قابل توجه است که این مرحله به صورت رایگان انجام می گیرد)
2- اعمال نظر استاد و گروه و تعیین نهایی موضوع
3- ثبت پروپوزال برای موضوع مورد نظر
4- تدوین فصل اول از پایان نامه (بیان مقدمه و پیشینه پژوهش)
5- تدوین فصل دوم از پایان نامه (بیان مواد و روش ها در طراحی)
6- تدوین فصل سوم از پایان نامه (شامل مدلسازی و تئوری فرآیند اصلی پایان نامه)
7- شبیه سازی و ارائه نتایج
8- تکمیل پایان نامه
-.-.-.-.-.-.-.-.-.-.-. -.-.-.-.-.-.-.-.-.-.-. -.-.-.-.-.-.-.-.-.-.-. -.-.-.-.-.-.-.-.-.-.-. -.-.-.-.-.-.-.-.-.-.-.-.-.-.
آموزش از راه دور و گام به گام در طی فرآیند انجام پایان نامه
ارائه مقالات در زمینه های مهندسی برق کنترل و قدرت برای چاپ در مقالات ISI و کنفرانس
ارائه مقاله در زمینه پایان نامه انجام شده با تخفیف ویژه
امکان تحویل کار در تهران و آموزش نهایی شبیه سازی ها و مراحل طراحی کار پایان نامه
انجام و سفارش شبیه سازی های برای مقالات ISI و کنفرانس در زمینه های مختلف برق قدرت
ارائه مقالات شبیه سازی شده و آماده به روز (جدید) برای پروژه های درسی مهندسی برق قدرت همراه با توضیحات کامل کار
-.-.-.-.-.-.-.-.-.-.-. -.-.-.-.-.-.-.-.-.-.-. -.-.-.-.-.-.-.-.-.-.-. -.-.-.-.-.-.-.-.-.-.-. -.-.-.-.-.-.-.-.-.-.-.-.-.-.
برای کسب اطلاعات دقیق و دریافت لیست موضوعی پروژه ها و شبیه سازی ها به ادامه مطلب رجوع کنید .
-.-.-.-.-.-.-.-.-.-.-. -.-.-.-.-.-.-.-.-.-.-. -.-.-.-.-.-.-.-.-.-.-. -.-.-.-.-.-.-.-.-.-.-. -.-.-.-.-.-.-.-.-.-.-.-.-.-.
به منظور کسب اطلاعات بیشتر و برقراری تماس با ما می توانید از طریق شماره 09120877443 و یا از طریق ایمیل payanpajuhesh@gmail.com اقدام نمایید .
پشتیانی آنلاین در تلگرام : 09120877443















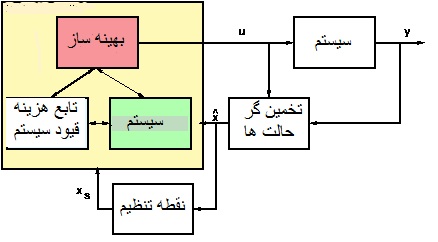
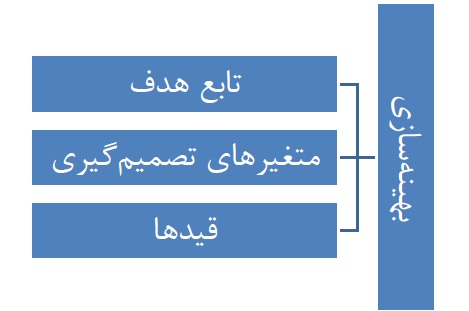 بهینه سازی در سیستم های قدرت
بهینه سازی در سیستم های قدرت