سیستم مدیریت انرژی بهینه هوشمند برای منابع توان هیبرید شامل منبع ذخیره ساز انرژی باتری و پیل سوختی
یک سیستم هیبریدی در کم هزینه ترین حالت شامل یکی از منابع کنترل پذیر مانند پیل سوختی می باشد که بتواند در هر لحظه با دریافت ورودی مورد نیاز (در این مورد هیدروژن) و در دمای مشخص توان بار را تامین کند ، در کنار این منبع می توان از منبع ذخیره ساز انرژی باتری به عنوان یک سیستم پشتیبان که در مواقع مورد نیاز توان را ذخیره و یا به صورت دشارژ وارد سیستم کند می باشد که این مسئله بوسیله متغیر SOC باتری انجام می پذیرد .
در یک پروژه پایان نامه تعریف شده ورودی پیل سوختی که هیدروژن ارسال شده از طریق تانک هیدروژنی می باشد مدیریت می شود در اینجا این کنترل بوسیله منطق فازی که از روش های هوشمند می باشد انجام می پذیرد و هدف آن ایجاد خروجی مورد نیاز از طریق پیل سوختی با همان ورودی لازم می باشد که جلوگیری از اتلاف توان را در دستور کار خود دارد .
در کنار این مسئله کنترل شارژ ولتاژ – جریان تطبیقی باتری دیگر هدف می باشد ، در انجام این پایان نامه از انتگرال خطای SOC باتری برای تخمین جریان مورد نیاز برای تنظیم ولتاژ بار خروجی استفاده می شود که مقداری پایدارتر نسبت به خود متغیر SOC باتری می باشد و این مسئله به صورت تطبیقی و با تخمین این جریان بدست می آید که در دینامیک باتری نیز موجود است .
شماتیک زیر روند ساختار کلی کار را نشان می دهد .
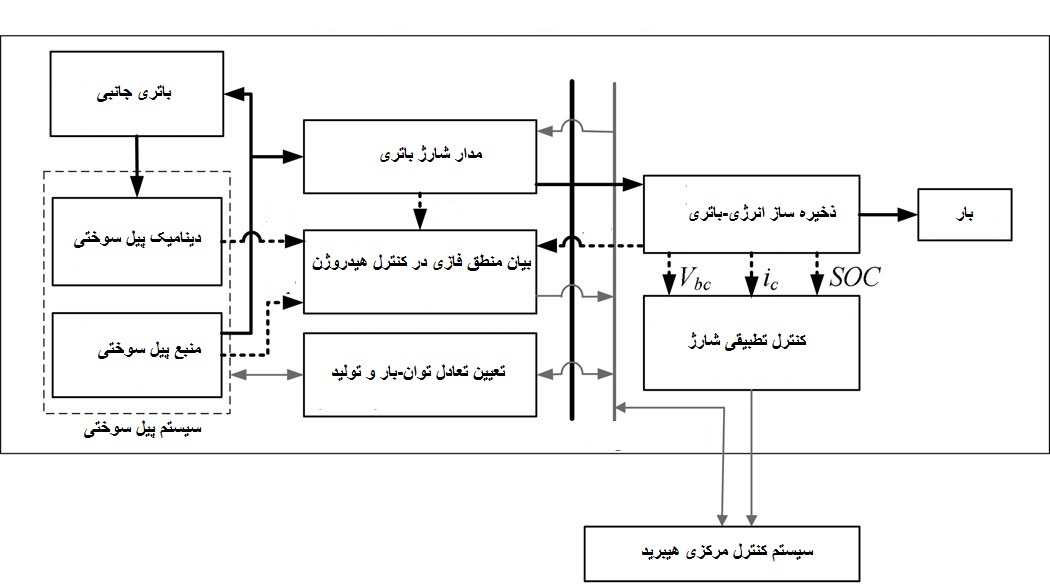
شماتیک سیستم هیبریدی مورد استفاده و کنترلی آن
هدف اساسی در این سیستم هیبرید که به صورت یک میکروگرید می باشد تثبیت ولتاژ خروجی در حین تغییرات بار می باشد به گونه ای که کمترین ریپل را در ولتاژ خروجی داشته باشیم و تغییرات حالت گذرا در کمترین زمان ممکن رخ دهد .
پس از مدل سازی اولیه برای سیستم پیل سوختی و تانک هیدروژنی که به صورت معادلات دینامیکی بیان می شود (به دلیل لزوم پیاده سازی روش تطبیقی) ، متغیر خروجی SOC باتری نوشته شده و انتگرال خطای SOC از مقدار 50 درصد تنظیم شده است و از این خطا به عنوان متغیر کلیدزنی برای مبدل باتری استفاده شده است . جدول منطق فازی برای سیستم تانک هیدروژنی نیز براساس طبیعت این سیستم و لزوم جلوگیری از اتلاف توان پیل سوختی بیان شده است .
در شبیه سازی این سیستم از نرم افزار متلب استفاده شده است و معادلات دینامیکی به صورت S-function بیان شده اند . برای پیاده سازی منطق فازی از GUI متناظر با آن در متلب استفاده شده است و بار به صورت بار تعریف شده در متلب با تغییر از طریق تابع جانبی عنوان شده است . برای بیان روش تطبیقی از جایگذاری معادلات آن در Matlab function به صورت گسسته در زمان استفاده شده است .