دانلود پروژه مهندسی برق کنترل ، بکارگیری کنترلر مد لغزشی
در این پروژه هدف ردیابی مسیر برای یک سیستم بیان شده با تابع تبدیل مستقیم می باشد ، در این پروسه از کنترلر مد لغزشی به این منظور استفاده شده است ، در بدست آوردن یک قانون معتبر برای سیستم مدلغزشی چندین مسئله بر کیفیت کار تاثیرگذار است که از آنجمله سرعت پاسخ ، خطای حالت ماندگار ، میزان نوسانات حالت گذرا و نهایتا میزان چترینگ قانون کنترلی از جمله این معیار ها می باشند .
آنچه که قانون کنترل براساس مد لغزشی را در این بین محبوب نموده کیفیت پاسخ خروجی ها به نسبت سایر کنترلرهاست ، اما در این بین میزان چترینگ یا نوسانات قانون کنترلی به نسبت سایر روش ها بالا بوده و استفاده کاربردی از مد لغزشی را سخت تر نموده است .
در پروژه ها و پایان نامه هایی که با مسئله مد لغزشی حل می شوند ، از روش هایی همچون منطق فازی و یا تابع شیب دار به جای تابع اشباع به منظور کاهش مقدار چترینگ استفاده می شود .
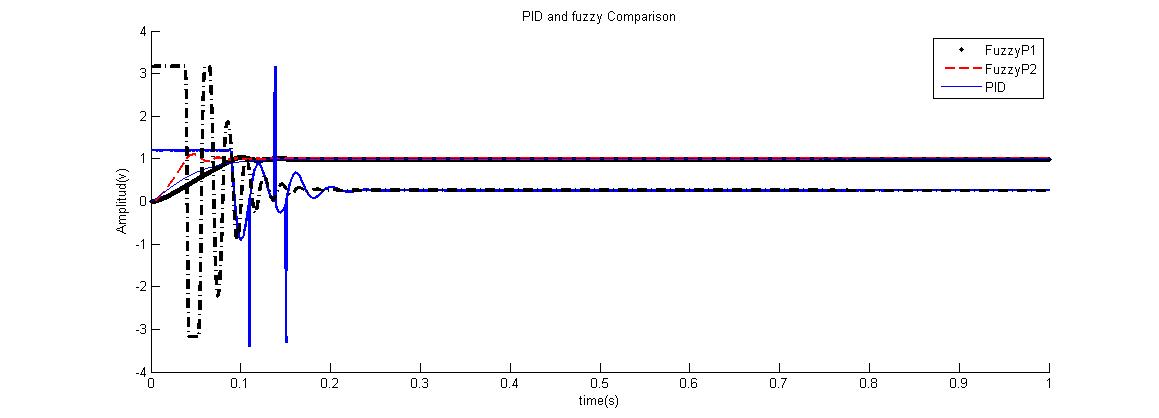
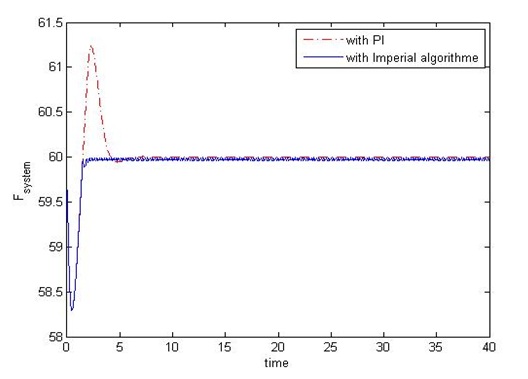
شکل زیر خروجی ردیابی را برای روش کنترلی مد لغزشی نشان می دهد .
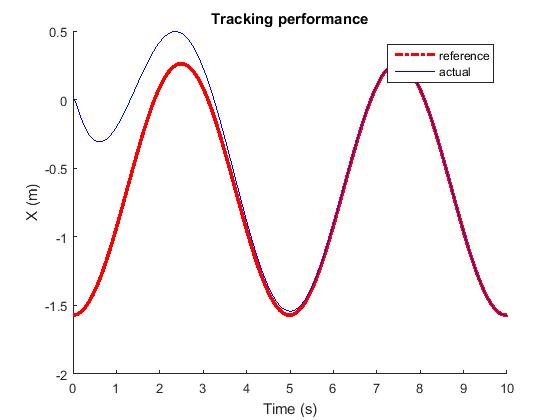
شکل ردیابی خروجی در کاربرد مدلغزشی
آنچه در طراحی سیستم کنترلی برای این روش مهم است یک مصالحه مناسب بین کیفیت پاسخ خروجی و میزان چترینگ مجاز در قانون کنترل می باشد .
در اکثر کاربردها مانند رباتیک و سیستم های قدرت میزان چترینگ بالا عملا کاربرد این روش را در این سیستم ها منتفی می کند .
لینک دانلود فایل سیمولینک متلب در ادامه مطلب می باشد .