دانلود پروژه مهندسی برق قدرت ، استفاده از UPFC به منظور جبران سازی توان اکتیو و راکتیو و بهبود پایدا
UPFC یکی از ادوات FACTS و به نوعی جدیدترین و پیشرفته ترین نوع آن هاست که در سیستم های قدرت به منظور جبران سازی بکار می رود . یک UPFC از یک جفت پل کنترل پذیر تشکیل شده است که از طریق ترانسفورماتورهای سری جریان را به شبکه قدرت تزریق می کند . کنترل کننده بکار رفته در UPFC یا جبران ساز همه منظوره قادر است توان اکتیو و راکتیو را به صورت توامان در خطوط انتقال قدرت کنترل نماید .
در واقع UPFC از ترکیب یک جبران ساز سنکرون استاتیک STATCOM که به صورت موازی به شبکه متصل می شود و یک جبران ساز سری سنکرون استاتیک SSSC که مشخصا به صورت سری در مدار قرار می گیرد تشکیل شده است . این دو جبران ساز در مدار UPFC در یک لینک ولتاژ DC مشترک می باشند .
مزیت اصلی UPFC در امکان کنترل توان اکتیو و راکتیو به صورت همزمان در خطوط انتقال می باشد ، به این ترتیب می توان فاز و اندازه ولتاژ خط و همچنین مقدار راکتانس خط (با استفاده از پل های سری شده) را با استفاده از آن تغییر و کنترل نمود . این امکان و همچنین کیفیت کنترل و سرعت واکنش UPFC به سناریوهای اتفاق افتاده در خطوط توزیع به کنترلر بکار رفته در آن بستگی دارد .
یک مدلسازی مناسب از UPFC که مبتنی بر واقعیت سیستم باشد اساس طراحی کنترلر برای آن خواهد بود ، پس از این مرحله می توان نسبت به نوع کنترلر و وظایف آن در خط تصمیم گیری نمود .
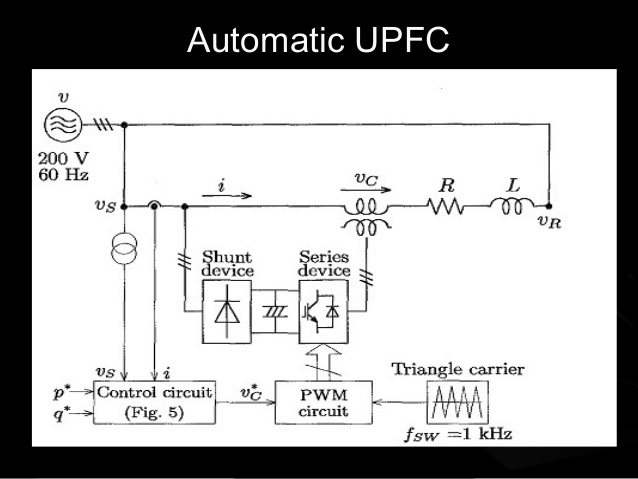
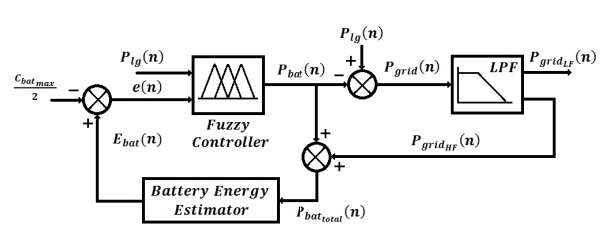
شماتیک قدرتی و کنترلی برای یک UPFC
شکل بالا شماتیک یک UPFC را نشان می دهد ، در این شماتیک هر کدام از بخش های سری و موازی توسط یک ترانسفورماتور به شبکه متصل شده اند و برای هر بخش نیاز به یک سیستم کنترلی می باشد که بتواند بخش مربوطه را کنترل نماید .
در ادامه مطلب یک فایل شبیه سازی مرتبط با UPFC و توضیحات مربوط به شبیه سازی آورده شده است که می توانید دانلود کنید .