طراحی پایدارساز سیستم قدرت PSS برای ماشین سنکرون متصل به شبکه قدرت
در بررسی دینامیک سیستم های قدرت ، پایداری شبکه قدرت متصل به ماشین سنکرون به عنوان مولد توان شبکه اهمیت بسزایی دارد . این مسئله به هنگام بروز خطا خود را آشکار می سازد ، آنچه که مسلم است در طول خط انتقال شبکه به باس تولید انواع سناریوهایی که منجر به خطا می شوند امکان وقوع دارند و هر کدام به لحاظ دینامیکی باعث ناپایداری ولتاژ و توان شبکه شده و در یک نگاه دقیق تر زاویه توان را افزایش می دهد ، زاویه توان یک متغیر اساسی در تولید ولتاژ و توان خروجی شبکه می باشد و ناپایداری آن به صورت مستقیم بر روی خروجی شبکه اثرگذار است .
انواع روش ها به منظور پایدارسازی این مسئله پس از قطع شبکه با استفاده از بریکرهای امنیتی در مقالات معرفی شده است . در سیستم هایی که مدل شبکه و ماشین به صورت خطی معرفی می شود AVR یا تنظیم کننده ولتاژ اتوماتیک یا اتوبوستر به عنوان اصلی ترین ادوات به منظور پایدارسازی شبکه معرفی می شود که برای مدل آن از چندین حالت معرفی شده در مقالات می توان استفاده کرد .
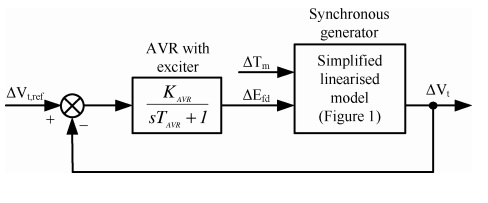
شماتیک یک AVR بکار رفته به منظور تولید فیدبک برای مدل شبکه
در شکل بالا یک مدل AVR نشان داده شده است که در آن سیگنال خطای ولتاژ در AVR مجهز به سیستم تحریک تبدیل به نیروی کنترلی برای سیستم ماشین خطی شده می شود تا سیگنال خطای ولتاژ را به صفر رسانده و شبکه را پایدار نماید .
اما در یک مدلسازی دقیق تر مجموعه ماشین سنکرون ، ترانسفورماتور و سیگنال کنترل پایدارساز به صورت غیرخطی و دقیق براساس مدل SMIB مدل سازی می شود . در این حالت نیاز به طراحی از طریق روش های غیرخطی برای شبکه مورد نظر می باشد تا بتواند پایداری را برای آن داشته باشد . در واقع مسئله پایداری در این حالت نمی تواند توسط AVR برطرف شود .
در طراحی پایدارساز به شیوه غیرخطی انواع روش های طراحی از قبیل خطی سازی فیدبک ، خطی سازی ورودی خروجی ، روش مد لغزشی و همچنین روش های بهینه سازی در جایابی بهینه پایدارساز در شبکه های چندماشینه و چند باسه معرفی می شود .
در انجام پایان نامه ها و پروژه های مرتبط با پایدارساز سیستم قدرت بایستی ابتدا اساس مدلسازی دینامیکی شبکه را مشخص کنید و با بهره گیری از سناریوی مورد نظر (مقاوم سازی ، تطبیقی نمودن ، بهینه سازی و ...) نسبت به انتخاب روش مورد نظر اقدام کنید .
در شبیه سازی روش مورد نظر و در ساختار غیرخطی بهترین انتخاب نرم افزار متلب می باشد چرا که به سادگی می توان معادلات غیرخطی را در آن وارد نمود ، اما در کارکرد خطی نرم افزار Pscad نیز می تواند مفید باشد .