دانلود و آموزش پروژه مهندسی برق کنترل ، استفاده از الگوریتم کلونی مورچگان به منظور بهینه سازی کنترلر
در این پروژه پایان نامه هدف بهینه سازی پارامترهای کنترلی بکار رفته در کنترل یک موتور DC می باشد ، به منظور استفاده از الگوریتم های بهینه سازی نظیر PSO ، ژنتیک ، رقابت های استعماری و یا کلونی مورچگان استفاده از مدلسازی فضای حالت یا تابع تبدیل سیستم مورد نظر می تواند انتخاب خوبی باشد و هدف نهایی را راحت تر بدست آورد .
در این پروژه نیز مدل تابع تبدیل که از متغیرهای فضای حالت سیستم بدست آمده است به این منظور استخراج شده است و در مدل قرار داده شده است .
کنترلر اصلی مورد استفاده در این پروژه یک PID می باشد ، که پارامترهای آن هدف بهینه سازی می باشد .
در هر برنامه بهینه سازی که از الگوریتم های هوشمند یاد شده استفاده می کند تعیین تابع هدف یا تابع هزینه امری ضروری می باشد در واقع هدف برنامه بهینه ساز در این پروسه ها مینیمم سازی این تابع هزینه خواهد بود .
در این پروژه تابع هزینه براساس مجموع نیروی کنترلی استفاده شده ، خطای حالت ماندگار سیستم و میزان نوسانات بیان شده است .
شکل زیر شماتیک شبیه سازی را نشان می دهد که در سیستم بکار رفته است .
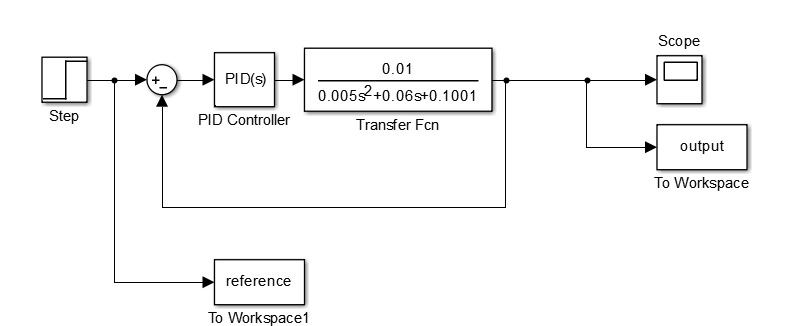
شماتیک شبیه سازی بکار رفته در متلب
در ادامه مطلب در مورد شبیه سازی توضیح داده شده و لینک دانلود شبیه سازی قرار گرفته است .