آموزش و دانلود پروژه مهندسی برق کنترل ، استفاده از رویت گر در حلقه کنترلی سیستم
یکی از مسائل اساسی در سیستم های کنترل طریقه بدست آوردن متغیرهای حالت از سیستم در حالتی است که به دلایلی همچون نبود سنسور یا بالا بودن هزینه این ادوات در بدست آوردن متغیرهای مورد نظر استفاده از آن ها در سیستم مقدور نباشد ، در این حالت نیاز به ارائه روشی به منظور بدست آوردن این متغیر از طریق خروجی ، سایر متغیرها و گاها سیگنال کنترلی می باشد ، به مجموعه معادلاتی که به این منظور در حلقه کنترلی سیستم بیان می شوند ، معادلات رویت گر گفته می شود .
طراحی معادلات رویت گر با توجه به مدل سیستم از طرق مختلف امکان پذیر می باشد ، در مدل های خطی به شرط رویت پذیر بودن سیستم می توان این متغیرهای حالت را بدست آورد و سپس با توجه به محاسبات لازم در کنترل پذیری سیستم نسبت به کنترل آن اقدام کرد .
در این سیستم ها گاها برخی از مدها یا متغیرهای حالت رویت پذیر نمی باشند که به آن ها مدهای رویت ناپذیر اطلاق می شود ، بیشتر این مباحث در تئوری کنترل مدرن مطرح می شوند و جزء عملیات ماتریسی می باشند .
در مراتب بالاتر این مسائل برای مدل های غیرخطی بررسی می شود ، در سیستم های غیرخطی روش هایی همچون فیلتر کالمن غیرخطی در طراحی سیستم های تخمین گر مورد استفاده قرار می گیرند . روش های دیگر براساس فیلتر مد لغزشی و یا استفاده از روش های هوشمند استوار است .
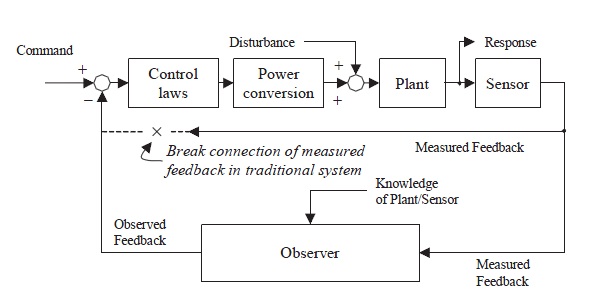
شماتیک یک رویت گر نمونه در حلقه کنترلی سیستم به منظور تخمین متغیرهای حالت
در شکل بالا محل بکارگیری یک رویت گر حالت نمایش داده شده است .
رویت گر ها عموما به منظور تخمین سیگنال های متغیر حالت بکار می روند ، گرچه از این سیگنال ها گاها در تخمین اغتشاش نیز استفاده می شود که مربوط به مباحث پروژه های سیستم کنترل فرآیند می باشد .
در رویت گرها از روش های هوشمند همچون شبکه های عصبی نیز به منظور تخمین حالات استفاده می شود .
در ادامه متلب فایل شبیه سازی مربوط به یک سیستم که معادلات رویت گر در آن منظور شده ، آمده است .
شکل زیر نتایج بدست آمده از طراحی رویت گر که در ادامه مطلب فایل های شبیه سازی آن آمده است را نشان می دهد .
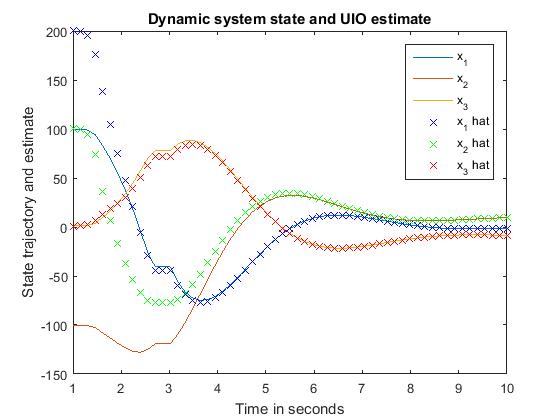
نتایج بدست آمده از رویت گر که در مقایسه با متغیرهای حالت اصلی می باشند
همانطور که مشخص است پس از حالت گذرا نتایج تخمین به مقادیر واقعی خود همگرا می شوند و این مسئله نشان از پایداری سیستم حلقه بسته شامل رویت گر و کنترلر می باشد .