پایدارساز سیستم قدرت و انواع روش های کنترل PSS
پایدارساز سیستم قدرت(PSS) به عنوان یک مولد توان از طریق سیستم تحریک در یک ماشین سنکرون متصل به شبکه قدرت(شین بی نهایت) عمل می کند. در حالت معمول و بدون بکارگیری پایدارساز ، شبکه قدرت در حین وقوع انواع خطاها بر روی سیستم دچار نوسانات گذرا می شود که این خطاها به طور معمول از خطای تکفاز تا سه فاز نامتقارن ، اتصالات بار یا جدا شدن از شبکه بالادست می تواند متفاوت باشد.
نوسانات حالت گذرا در شبکه های قدرت مولفه های پایداری سیستم در حوزه زمان و فرکانس را کاهش می دهد. این متغیرهای زمانی به عنوان متغیرهای حالت سیستم در حوزه دینامیکی تعریف می شوند که از آن جمله می توان به زاویه توان ، فرکانس زاویه ای (سرعت روتور-فرکانس شبکه) و توان شبکه اشاره کرد.
البته مدل های بیان شده مختلفی به منظور مشاهده رفتار سیستم پیشنهاد شده است که معروفترین آن سیستم با سه متغیر حالت معرفی شده می باشد. حالت های متناسب با 4 متغیر و یا 7 متغیر نیز در مقالات اشاره شده اند.
معتبرترین مدل، مدل تعریف شده براساس SMIB می باشد که در کتاب های رفرنس نیز آمده است. مدل مورد اشاره بصورت غیرخطی معرفی می شود و در آن روابط بین متغیرهای حالت سه گانه غیرخطی بیان شده است.
کاربری پایدارسازهای سیستم قدرت برای شبکه های انتقال به صورت تک ماشینه و یا چند ماشینه می باشد. در حالت تک ماشینه تنها یک ماشین سنکرون در شبکه قرار می گیرد و در حالت های چندماشینه نیز چند ماشین خواهیم داشت که به ازای هر کدام یک پایدارساز مجزا مورد استفاده قرار می گیرد.
بطور مشخص در استفاده از پایدارساز سیستم قدرت نیاز به طراحی آن می باشد. این طراحی برای پایدارسازهای مشخص شده با مدل خطی کار ساده ای است ، حال آنکه در مدل های غیرخطی نیاز است تا روش های مدون شناخته شده (همچون روش های فیدبک خطی ساز ، مدلغزشی ، گام به عقب ، تطبیقی و ...) به منظور طراحی آن مورد استفاده قرار گیرد.
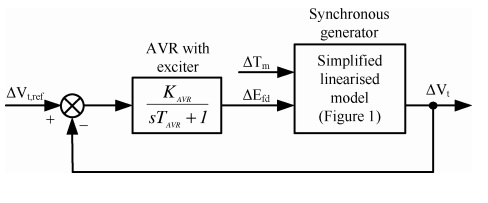
در ادامه مطلب بلوک دیاگرام ساختار پایدارساز سیستم قدرت آورده شده است.