آموزش و دانلود پروژه مهندسی برق قدرت ، بکارگیری پیل سوختی در ورودی یک اینورتر چندطبقه به منظور کاربر
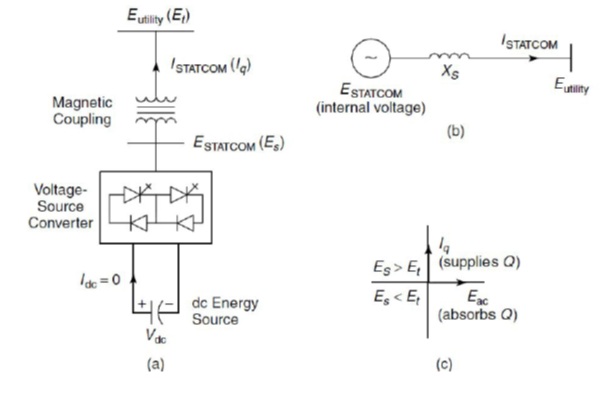
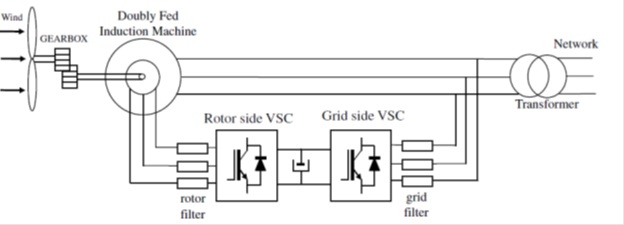
بهبود کیفیت توان در شبکه های قدرت سراسری از مباحث مهم در بررسی سیستم های قدرت می باشد ، یکی از ابزار مورد استفاده در این مسئله و مهمترین آن ها بکارگیری ادوات FACTS می باشد ، ادوات FACTS با استفاده از یک منبع توان DC می تواند برای نوسانات توان و ولتاژ که در نتیجه توان راکتیو درخواستی مصرف کننده ، خطای اتصال کوتاه در شبکه و یا هارمونیک های تولید شده در اثر کاربرد منابع تجدیدپذیر نظیر توربین بادی می باشد بکار رود ، در STATCOM وضعیت اتصال بصورت موازی در شبکه می باشد و اغلب به صورت تزریق توان متناسب در شبکه اقدام می کند .
در حالت کلی بیشتر بحث در سیستم های اینورتر چندطبقه بر روی مقادیر خازن DC بکار رفته بر روی هر طبقه از اینورتر می باشد ، در کنار این مسئله نحوه کنترل و کلیدزنی IGBT ها بکار رفته بر روی هر پل نیز از چالش های دیگر در اینورتر ها می باشد .
در استفاده نهایی از اینورتر می توان از روش STATCOM و اتصال موازی برای آن استفاده کرد . در کنترل کلیدزنی انواع روش ها استفاده می شود ، روش های بهینه سازی در کاهش ادوات بکار رفته تا استفاده از روش های هوشمند نظیر منطق فازی و شبکه های عصبی به منظور کنترل کلیدزنی از این نوع می باشند .
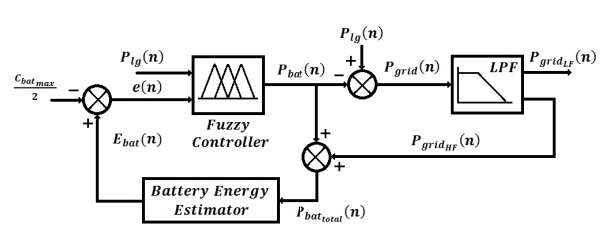
در شکل زیر شماتیک یک اینورتر چندطبقه (مولتی اینورتر) را ملاحظه می کنید .
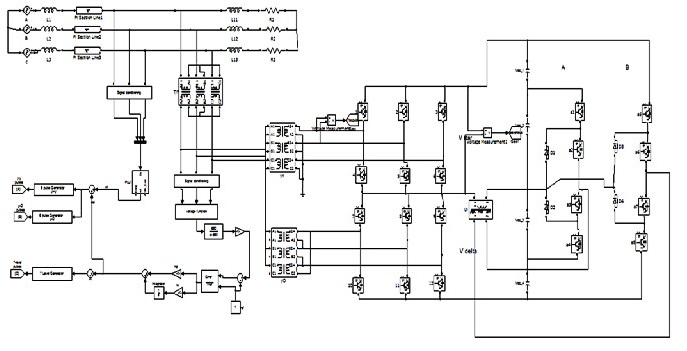
مولتی اینورتر بکار رفته در پروژه
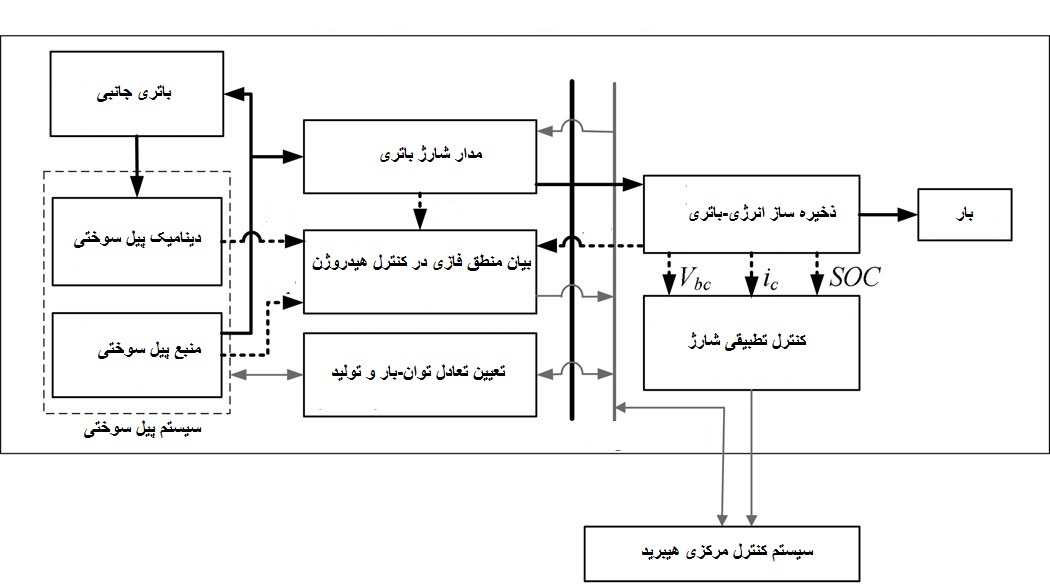
بحث اساسی در این پروژه پایان نامه کاهش هارمونیک های شبکه در حضور مولتی اینورتر می باشد که از یک سو به روش کنترلی استفاده شده بستگی دارد و از سویی دیگر این مسئله از منبع DC بکار رفته بعنوان ورودی STATCOM می باشد ، در این پروژه از پیل سوختی (fuel cell) به عنوان ورودی تغذیه مستقیم استفاده شده است .
لینک دانلود بخشی از شبیه سازی پایان نامه در نرم افزار متلب در ادامه متلب می باشد .