دانلود پروژه مهندسی برق قدرت ، کنترل فازی برای موتور یونیورسال
در این پست پروژه مهندسی برق قدرت که در آن با استفاده از کنترل برمبنای منطق فازی برای موتور یونیورسال (Universal) جدول فازی تعبیه شده و شبیه سازی های آن انجام شده است خواهیم پرداخت .
در این پروژه ابتدا مدل مورد نظر برای موتور بدست آمده است به این صورت که سیستم در یک حلقه بسته به همراه محرک ، موتور و سنسور فیدبک قرار داده شده و با استفاده از تئوری کنترل مدل کامل آن بدست آمده است . در این مقاله هدف دریافت دامنه مطلوب برای ولتاژ خروجی می باشد که برای مقادیر مطلوب متفاوت بررسی شده است و حرکت های پله ای در ولتاژ نیز تحت بررسی قرار گرفته است .
در این مقاله با توجه به کاربرد منطق فازی ابتدا متغیرهای ورودی مورد نیاز برای کنترل فازی از سیستم استخراج شده اند که شامل متغیر خطا و مشتق خطا می باشند . این متغیرها به عنوان ورودی منطق فازی می باشند که در حوزه گسسته قرار داده شده اند . متغیر خروجی در منطق فازی مورد نظر سیگنال کنترلی می باشد که به صورت متغیر هدف مطرح می باشد .
آنچه که مسلم است نیاز به قانون نویسی معتبر برای منطق فازی می باشد ، مسئله قانون نویسی برای منطق فازی براساس تجربه در استفاده از سیستم های کنترلی متداول مانند PID بدست می آید تا بهترین ضابطه کنترلی تحت شرایط مختلف خطا و مشتق آن بیان شده و قانون نویسی شود .
در شکل زیر نتیجه کار برای شبیه سازی ارائه شده است :
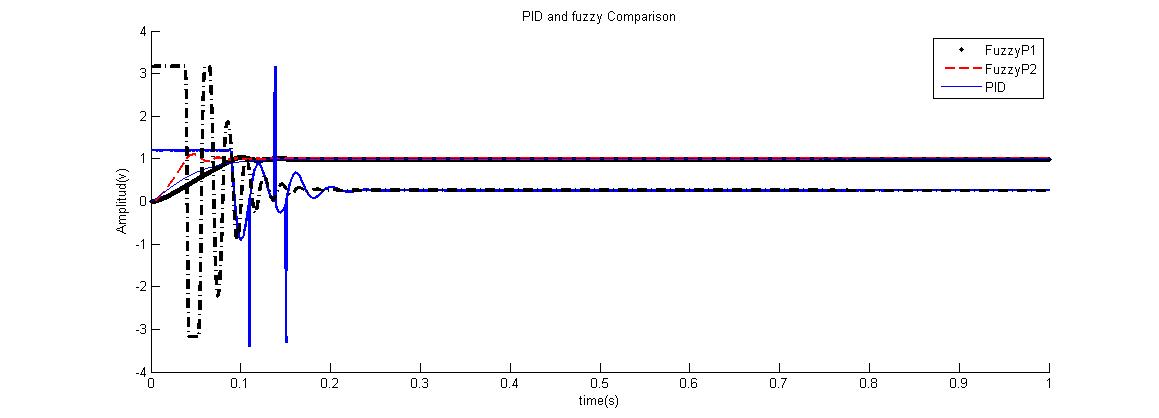
شکل موج مقایسه نمودار PID ، منطق فازی نوع 1 ، منطق فازی 2
در این شبیه سازی دو نوع فازی برای سیستم بکار رفته است در نوع اول اشباع سیستم با شیب صعودی در مجموعه فازی رخ می دهد . و در فازی دوم اشباع سیستم با شیب نزولی در مجموعه فازی می باشد . در نتیجه در فازی نوع اول نوسان بیشتر در حالت و سرعت بیشتر در رسیدن به نقطه مطلوب را داریم (مقادیر ویژه نزدیکتر به محور) و در نوع دم نوسانات کمتر و بالتبع سرعت کمتر در رسیدن به نقطه مطلوب خواهد بود .
لینک دانلود مقاله مورد نظر و فایل شبیه سازی در ادامه مطلب می باشد .